
Teleonomies
Sofa für die Augen, 2011
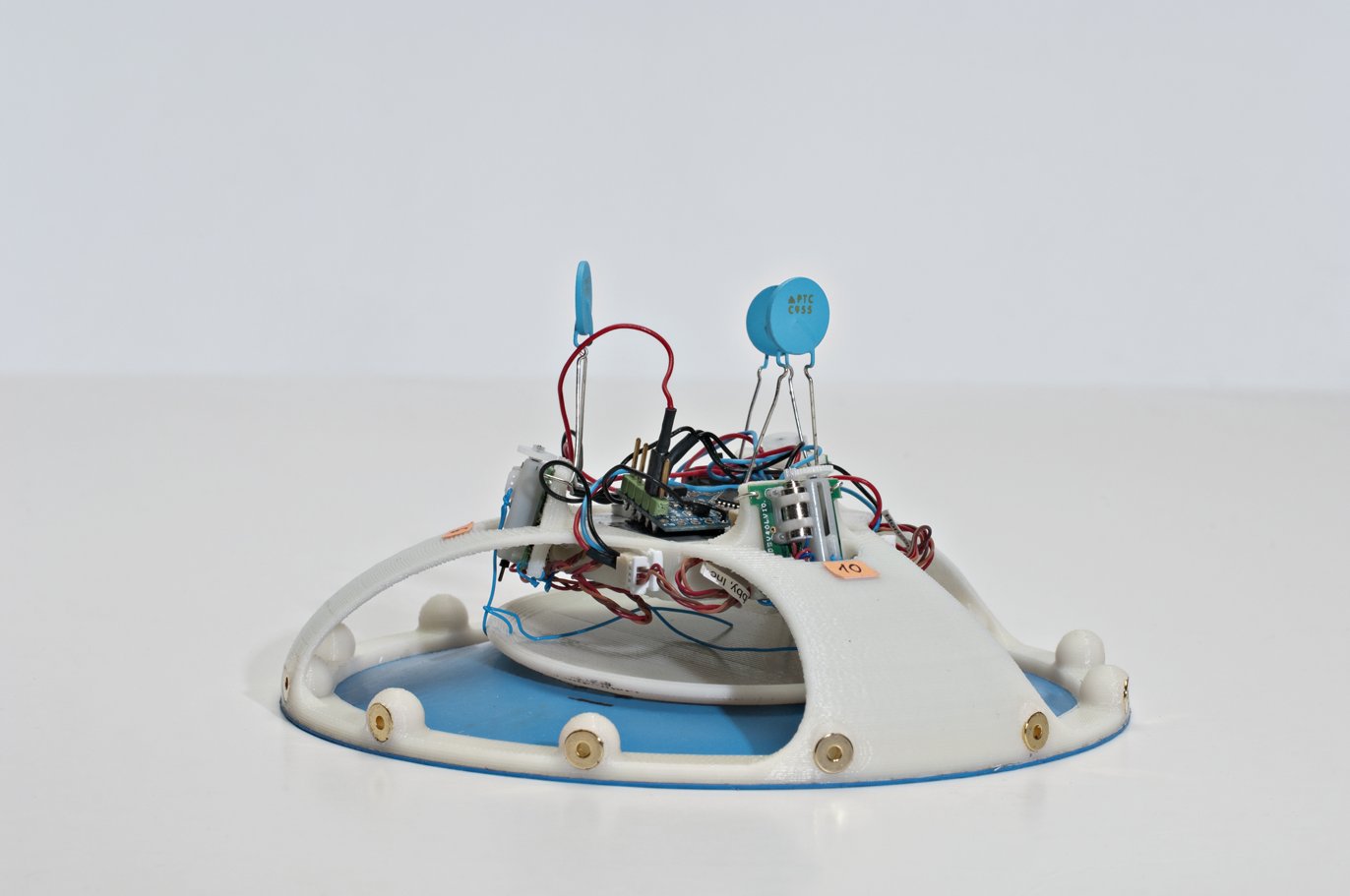
Die Projektanlage ist eine Komposition von mehreren Robotermodulen die sich schwebend auf einem Lufttisch bewegen. Dieses Projekt ist im Rahmen einer Artist in Residency im Labor für künstliche Intelligenz der Universität Zürich entstanden. Inspirierend für die Gestaltung der Module waren Design Prinzipien, wie man sie bei UFOs aber auch in der Künstlichen Intelligenz findet. Ersteres schlägt sich in einer Leichtigkeit und Laufruhe der Bewegung der Roboter nieder, die sich auf dem Luftbett nahezu gravitationslos bewegen. Zweiteres, in der 'Morphologischen Komputation'1 wie man sie im Artificial Intelligence Ansatz findet, der z.B. von Rodney Brooks oder Rolf Pfeiffer vertreten wird. Anstelle rechenintensiver Prozesse fokusiert dieser Ansatz der künstlichen Intelligenz u.a. auf die Eigenschaften der Materialien in ihrem Milieu und macht sich diese zu Nutze um intelligentes Verhalten von Robotern zu erzielen.
In der Projektanlage wird die spezielle Morphologie der Roboter genutzt um mit sehr einfachen Prinzipien ein komplexes Verhalten zu generieren. Durch das Herdenverhalten der einzelnen Robotern - das lokal auf den einzelnen Modulen einprogrammiert ist - ensteht global ein emergentes Verhalten welches als 'Sofa für die Augen' in Form einer Komposition von Bewegung erfahren werden kann.
[Datenmaterial]
Bilder (zip|6.9MB)
[Präsent bei]
Robots on tour Event im Science Café Zürich, CH, 2013.
[Technologie]
Lufttisch (Eigenbau), Mini Roboter mit div. Elektronik (Eigenbau); 80 H x 180 B x 180cm T
Dank an: Artist in Labs Programm, Naveen Kuppuswamy, Shuhei Myashita, Labor für Künstliche Intelligenz der Universität Zürich.
Photos courtesy of Thorsten Strohmeier.